Core Focus Areas
Deformable object manipulation, multi-modal perception, and long-horizon autonomy.
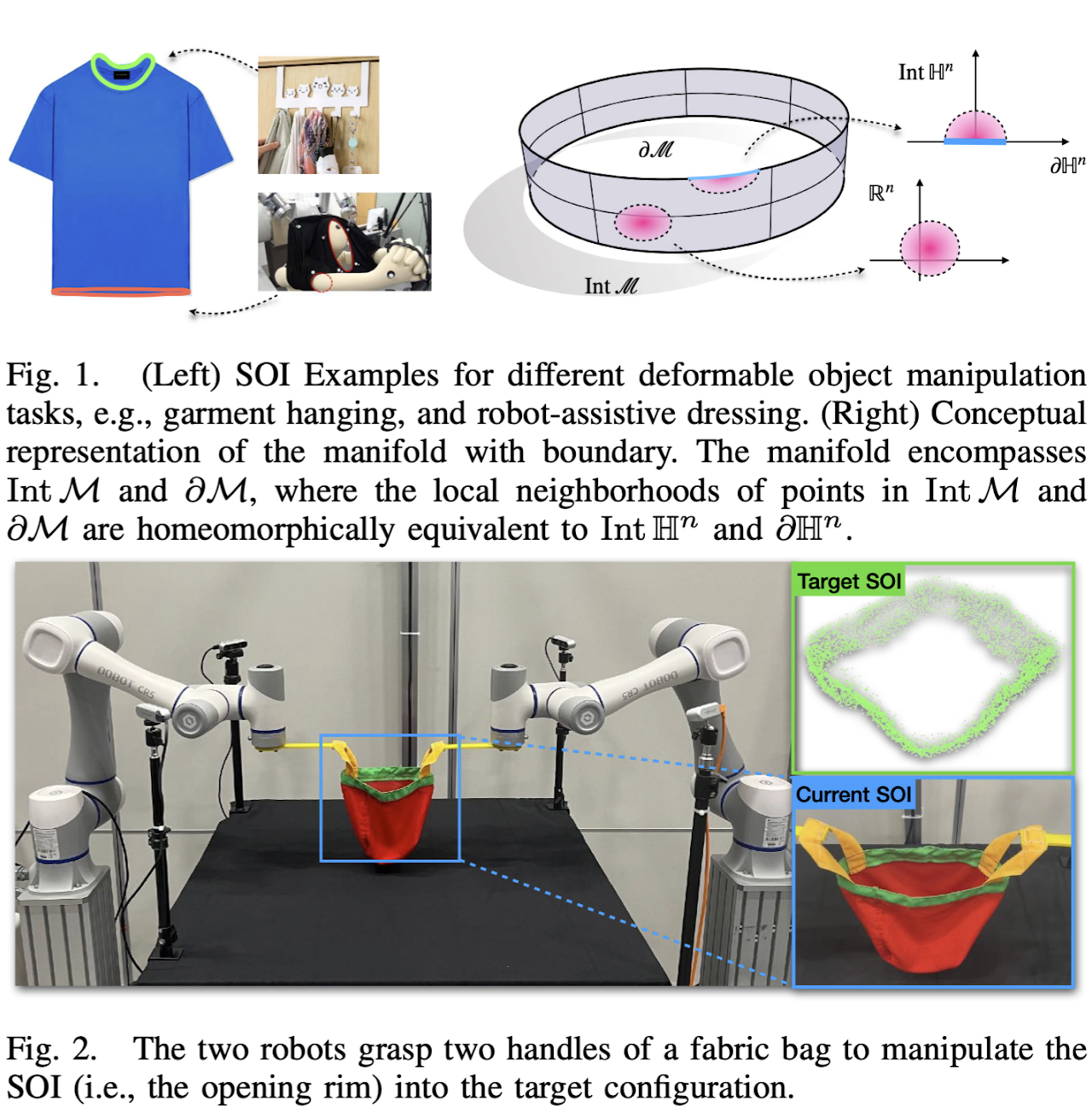
Deformable Object Manipulation
Learning and modeling for non-rigid materials (garments, bags, granular materials), including neural particle-based dynamics and interactive perception under contact.
Dexterous Manipulation
Perception and control that fuse vision with touch/force feedback to handle uncertainty, detect contact, and improve dexterity.
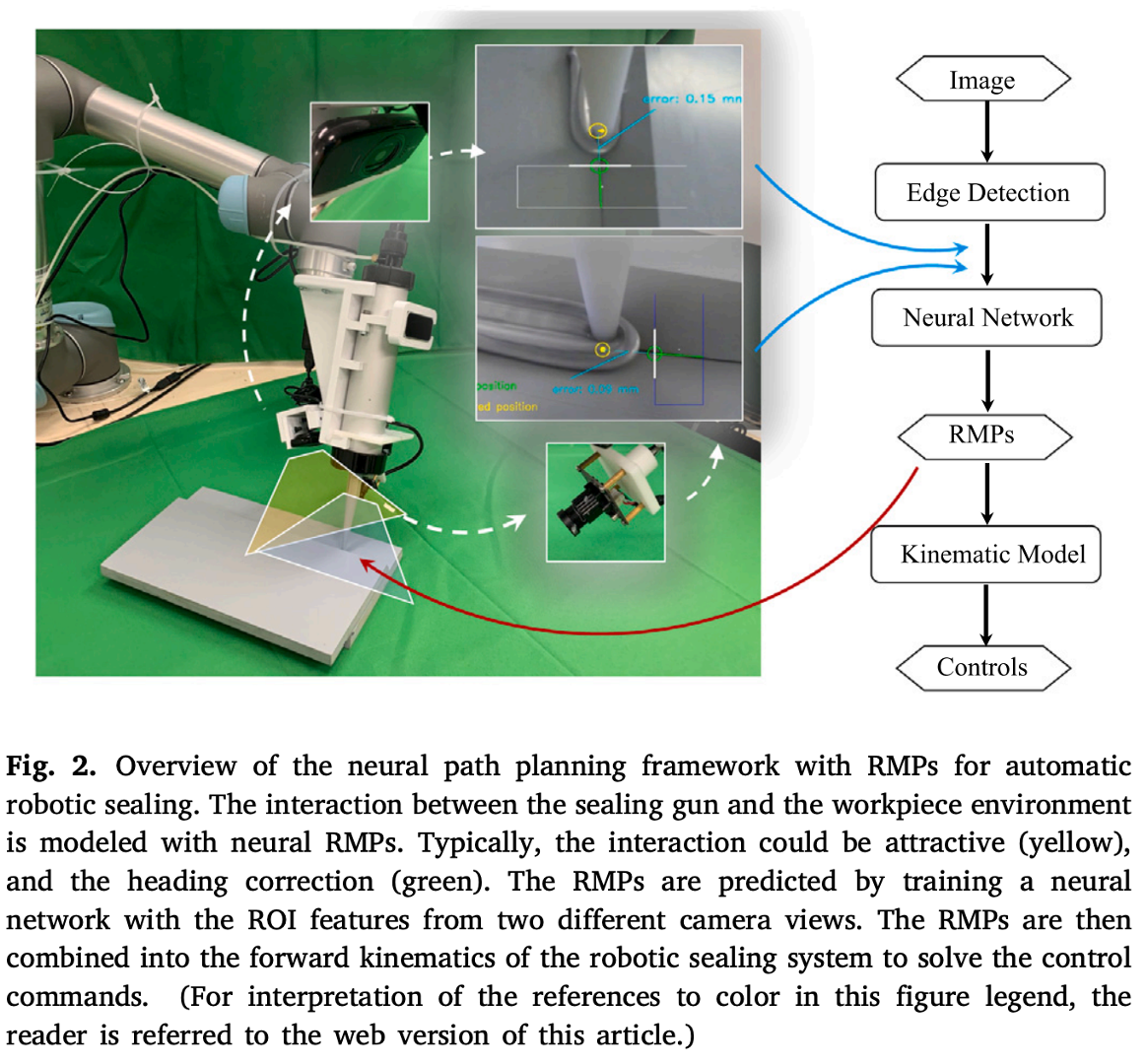
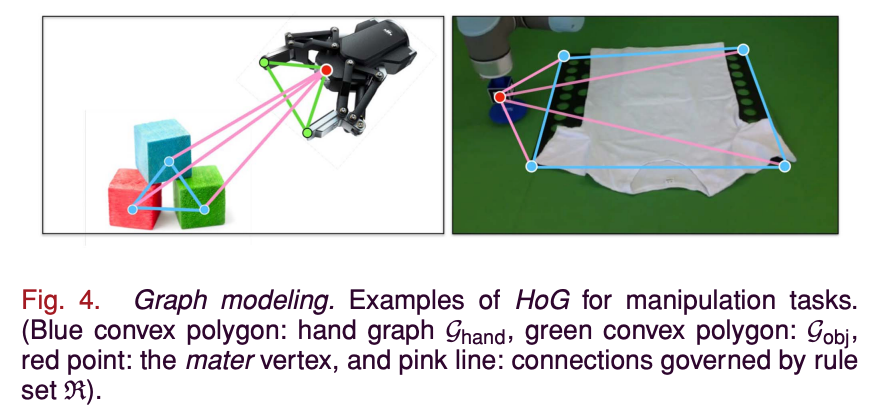
Task & Motion Planning
Planning for long-horizon manipulation, including subgoal reasoning under sparse rewards and contact-aware trajectories.
Team Members
EMAIL Robotics Lab

Dr. Peng Zhou
Lab PI · Assistant Professor
Great Bay University (GBU)

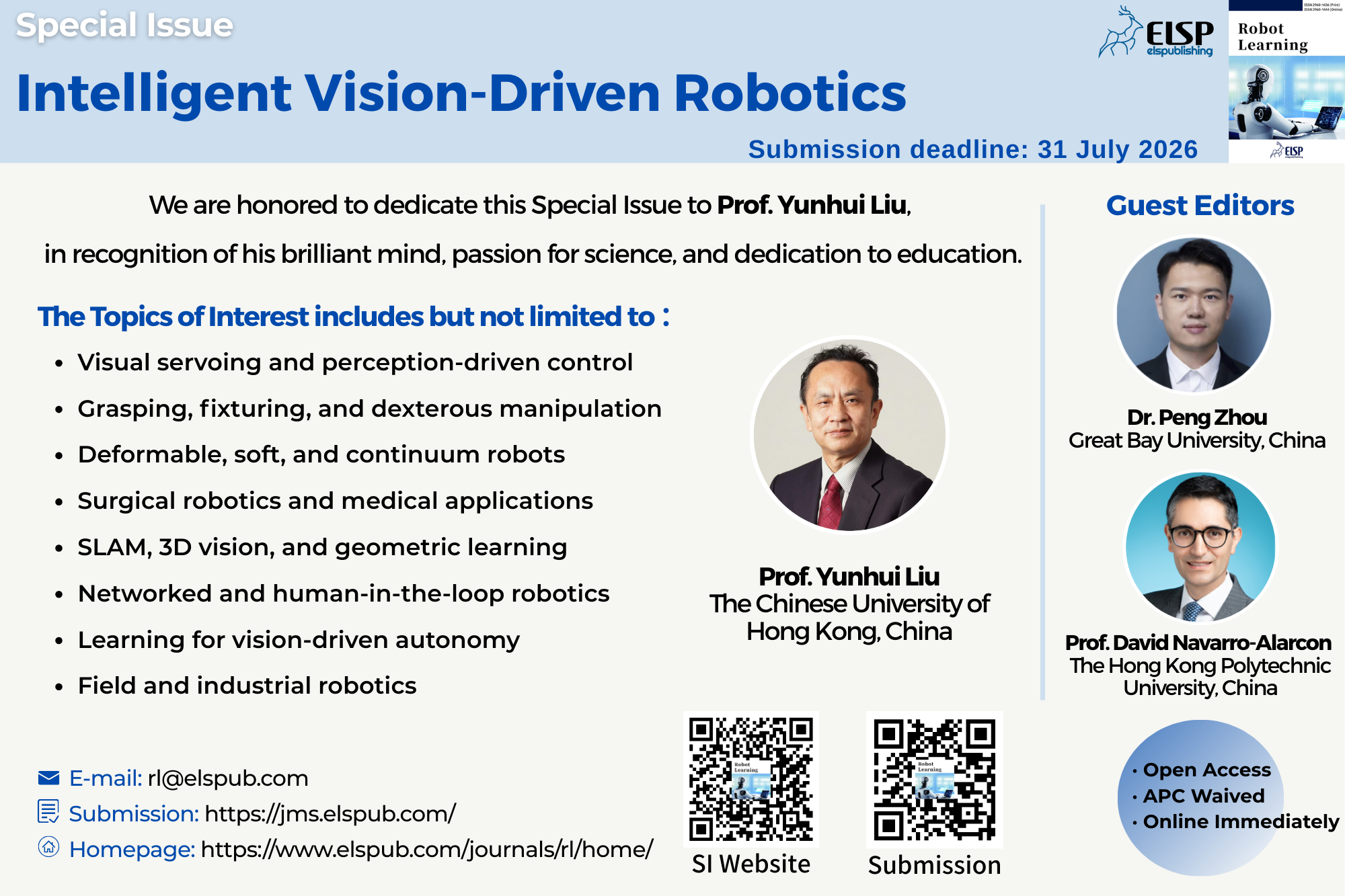
Prof. David Navarro-Alarcon
Co-PI on Ph.D. programs
The Hong Kong Polytechnic University
Prof. Jia Pan
Co-PI on Ph.D. program
The University of Hong Kong

Dr. Jun Hu
Postdoc Researcher (2025)
Tsinghua Shenzhen International Graduate School

Zhongxun Li
Visiting Ph.D. Student
The University of Hong Kong

Ziyuan Wang
Ph.D. Student (2025)
Harbin Institute of Technology, Shenzhen

Xi Chen
M.S. Student (2025)
Shenzhen University

Sihan Chen
Visiting Ph.D. Student
The University of Hong Kong

Zeliang Guo
Visiting M.S. Student
The University of Manchester

Fangjun Chen
Visiting Undergraduate Student
Southern University of Science and Technology
Fangyuan Wang
Visiting Ph.D. Student
The Hong Kong Polytechnic University

Guorui Pei
Visiting Undergraduate Student
Taiyuan University of Technology
Selected Publications
PDF/code/video links updated when available.
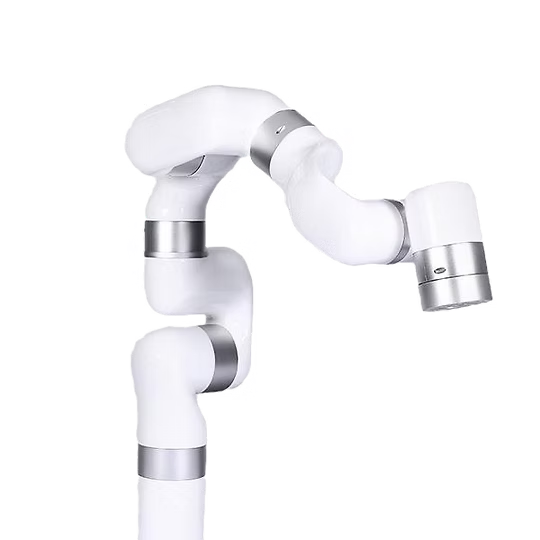
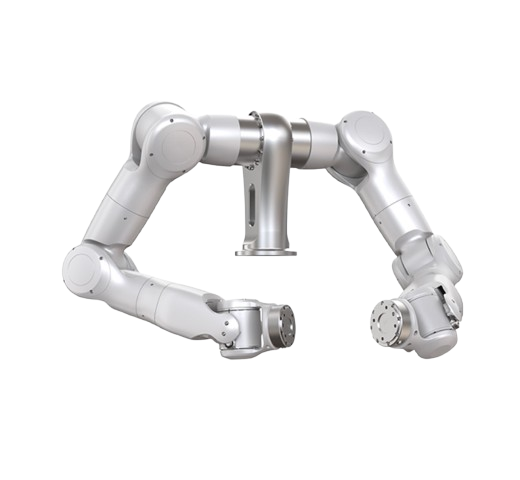
Robots & Devices
Key platforms powering our manipulation research.



Open to Collaboration & Recruitment
We welcome talents in robotics, learning, and control.
Openings
Ph.D. students, postdocs, visiting students, and research interns (subject to program availability).
What to Send
CV + short research statement + (optional) representative paper/code/demo link.
Contact
Email (obfuscated): pzhou AT gbu DOT edu DOT cn